Mini R2-D2

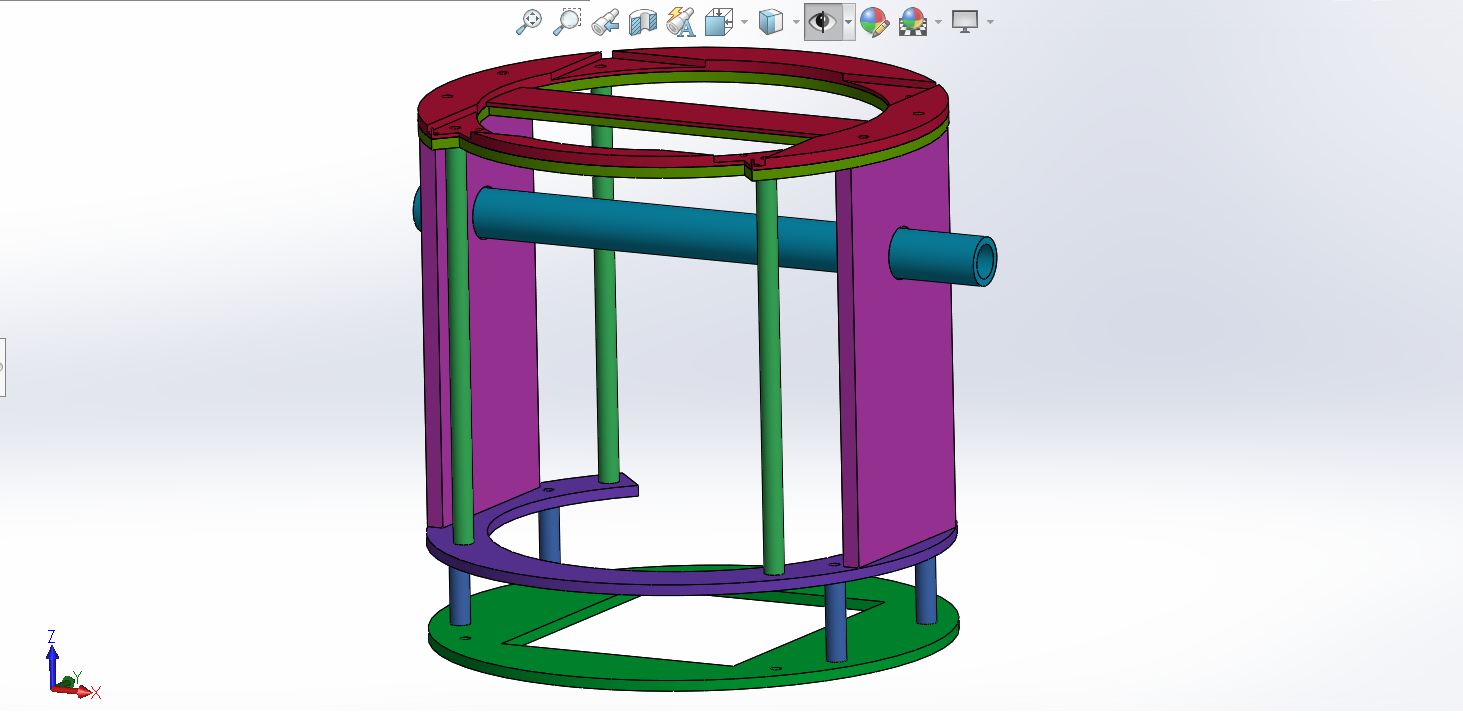
Frame Design⌗
The design was made taking into account the multiple vents and panels of the robot seen on the films, so in a future it could have space to accommodate little systems for their movement. The measurements took into account to make the frame where taken from the website wwww.astromech.com
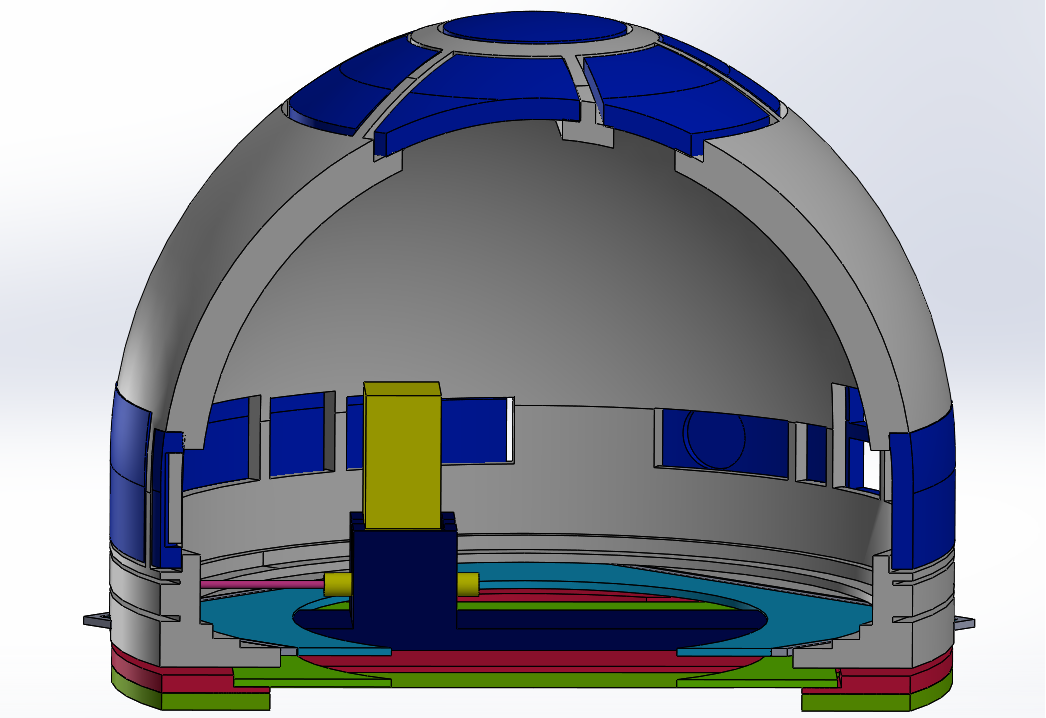
Head mechanisim⌗
- Solidworks design
The operation of this mechanism is simple it consist on a motor in the center of the head which gives action to a axial gear that moves smoothly thanks to the help of a lazy Susan that is attached to the from and the base of the head.
- Arduino program
else if (letter == 'E')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(CABD, LOW);
digitalWrite(CABA, HIGH);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Cab Izq"));
digitalWrite(LedA, HIGH);
delay(10000);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
digitalWrite(CABD, LOW);
digitalWrite(CABA, LOW);
}
else if (letter == 'F')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(CABD, HIGH);
digitalWrite(CABA, LOW);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F(" Cab Der"));
digitalWrite(LedA, HIGH);
delay(10000);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
digitalWrite(CABD, LOW);
digitalWrite(CABA, LOW);
}
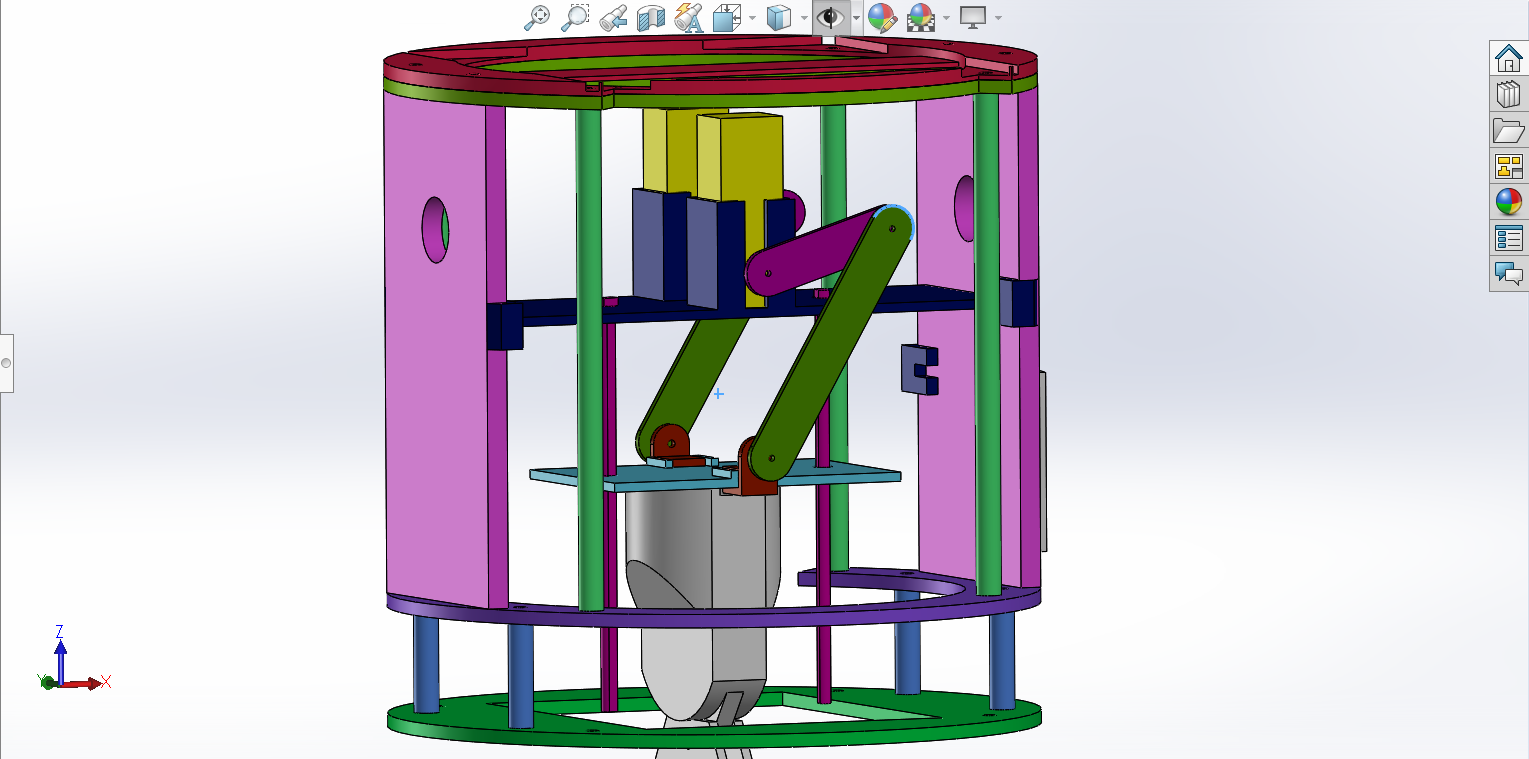
Center leg⌗
- Solidworks Design
Simple scissor mechanism for the center leg to come up or down.
- Arduino Code
if (letter == 'G')
{
randNumber = random(1, 16);
digitalWrite(LedA, LOW);
digitalWrite(APieCD, HIGH);
digitalWrite(APieCA, LOW);
digitalWrite(BPieCD, HIGH);
digitalWrite(BPieCA, LOW);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Pie Central Arriba"));
digitalWrite(LedA, HIGH);
delay(1500);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
digitalWrite(APieCD, LOW);
digitalWrite(APieCA, LOW);
digitalWrite(BPieCD, LOW);
digitalWrite(BPieCA, LOW);
}
else if (letter == 'H')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(APieCD, LOW);
digitalWrite(APieCA, HIGH);
digitalWrite(BPieCD, LOW);
digitalWrite(BPieCA, HIGH);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Pie Central Abajo"));
digitalWrite(LedA, HIGH);
delay(300);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
digitalWrite(APieCD, LOW);
digitalWrite(APieCA, LOW);
digitalWrite(BPieCD, LOW);
digitalWrite(BPieCA, LOW);
}
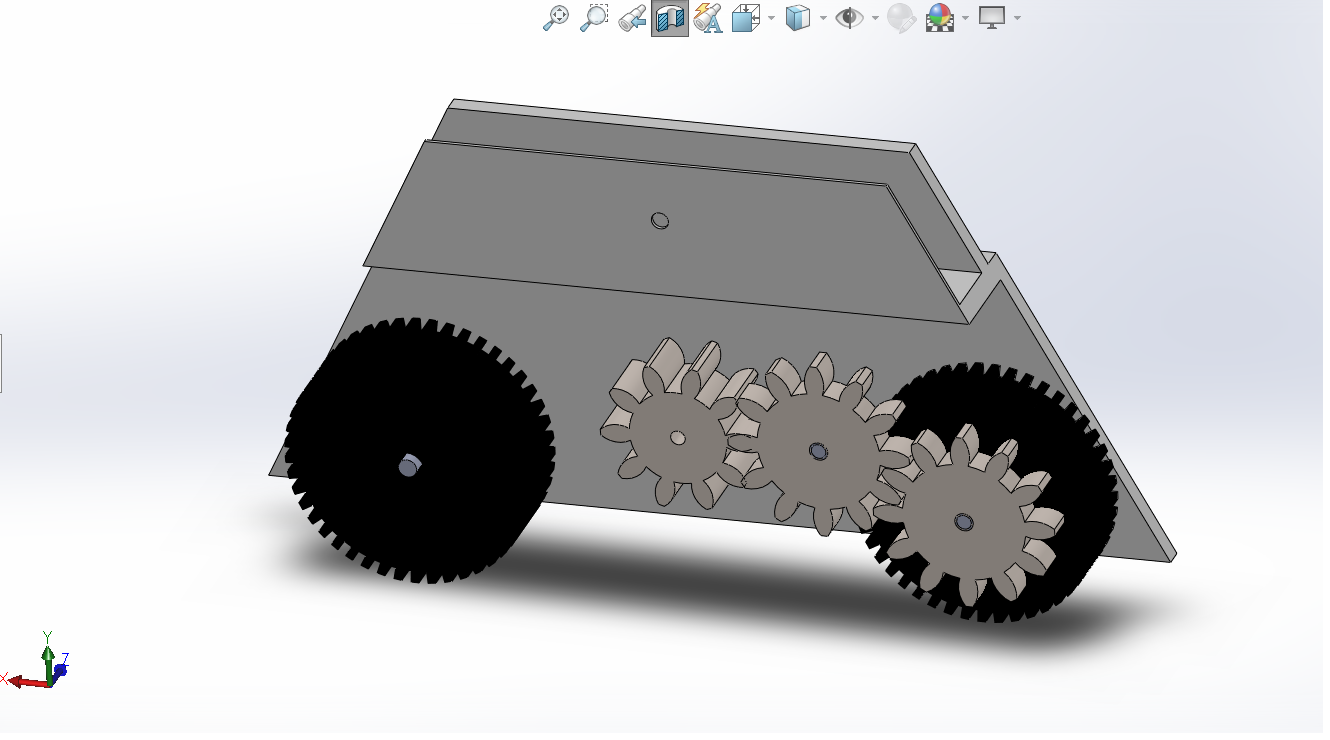
Foot⌗
- Solidworks Design
System of gears to give the system more torque and pull force.
- Arduino Code
if (letter == 'C')
{
randNumber = random(1, 16);
digitalWrite(LedA, LOW);
digitalWrite(IZQD, LOW);
digitalWrite(BIZQD, LOW);
digitalWrite(IZQA, LOW);
digitalWrite(BIZQA, LOW);
digitalWrite(DERD, HIGH);
digitalWrite(BDERD, HIGH);
digitalWrite(DERA, LOW);
digitalWrite(BDERA, LOW);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Derecha"));
digitalWrite(LedA, HIGH);
delay(2500);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
}
else if (letter == 'D')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(IZQD, LOW);
digitalWrite(IZQA, HIGH);
digitalWrite(DERD, LOW);
digitalWrite(DERA, LOW);
digitalWrite(BIZQD, LOW);
digitalWrite(BIZQA, HIGH);
digitalWrite(BDERD, LOW);
digitalWrite(BDERA, LOW);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Izquierda"));
delay (2500);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
}
else if (letter == 'A')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(IZQD, HIGH);
digitalWrite(IZQA, LOW);
digitalWrite(DERD, LOW);
digitalWrite(DERA, HIGH);
digitalWrite(BIZQD, HIGH);
digitalWrite(BIZQA, LOW);
digitalWrite(BDERD, LOW);
digitalWrite(BDERA, HIGH);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Adelante"));
digitalWrite(LedA, HIGH);
delay(1000);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
}
else if (letter == 'B')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(IZQD, LOW);
digitalWrite(IZQA, HIGH);
digitalWrite(DERD, HIGH);
digitalWrite(DERA, LOW);
digitalWrite(BIZQD, LOW);
digitalWrite(BIZQA, HIGH);
digitalWrite(BDERD, HIGH);
digitalWrite(BDERA, LOW);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Atras"));
digitalWrite(LedA, HIGH);
delay(1000);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
}
Results⌗

- Circuits

- Arduino Code Complete
#include "Arduino.h"
#include "SoftwareSerial.h"
#include "DFRobotDFPlayerMini.h"
SoftwareSerial mySoftwareSerial(10, 11); // RX, TX
DFRobotDFPlayerMini myDFPlayer;
void printDetail(uint8_t type, int value);
int IZQD = 2;
int IZQA = 3;
int BIZQD = A1;
int BIZQA = A0;
int DERD = 6;
int DERA = 7;
int BDERD = 12;
int BDERA = 13;
int CABD = 5;
int CABA = 4;
int LedR = 8;
int LedA = 9;
int APieCD = A3;
int APieCA = A2;
int BPieCD = A4;
int BPieCA = A5;
long randNumber;
void setup() {
pinMode(LedR, OUTPUT);
pinMode(LedA, OUTPUT);
pinMode(IZQD, OUTPUT);
pinMode(IZQA, OUTPUT);
pinMode(DERD, OUTPUT);
pinMode(DERA, OUTPUT);
pinMode(BIZQD, OUTPUT);
pinMode(BIZQA, OUTPUT);
pinMode(BDERD, OUTPUT);
pinMode(BDERA, OUTPUT);
pinMode(CABD, OUTPUT);
pinMode(CABA, OUTPUT);
pinMode(APieCD, OUTPUT);
pinMode(APieCA, OUTPUT);
pinMode(BPieCD, OUTPUT);
pinMode(BPieCA, OUTPUT);
mySoftwareSerial.begin(9600);
Serial.begin(115200);
randomSeed(analogRead(0));
Serial.println();
Serial.println(F("DFRobot DFPlayer Mini Demo"));
Serial.println(F("Initializing DFPlayer ... (May take 3~5 seconds)"));
Serial.println();
Serial.println(F("=================================================================================================================================="));
Serial.println(F(" [A] Adelante"));
Serial.println(F(" [B] Atras"));
Serial.println(F(" [C] Derecha"));
Serial.println(F(" [D] Izquierda"));
Serial.println(F(" [E] Cabeza Izq"));
Serial.println(F(" [F] Cabeza Der"));
Serial.println(F(" [G] Pie central Arriba"));
Serial.println(F(" [H] Pie Central Abajo"));
Serial.println(F(" [I] Stop"));
Serial.println();
Serial.println(F("================================================================================================================================="));
if (!myDFPlayer.begin(mySoftwareSerial)) {
Serial.println(F("Unable to begin:"));
Serial.println(F("1.Please recheck the connection!"));
Serial.println(F("2.Please insert the SD card!"));
while (true) {
delay(0);
}
}
Serial.println(F("DFPlayer Mini online."));
myDFPlayer.volume(10); //Set volume value. From 0 to 30
}
void loop() {
digitalWrite(LedR, HIGH);
if (Serial.available() > 0)
{
digitalWrite(IZQD, LOW);
digitalWrite(IZQA, LOW);
digitalWrite(DERD, LOW);
digitalWrite(DERA, LOW);
digitalWrite(BIZQD, LOW);
digitalWrite(BIZQA, LOW);
digitalWrite(BDERD, LOW);
digitalWrite(BDERA, LOW);
digitalWrite(CABD, LOW);
digitalWrite(CABA, LOW);
digitalWrite(APieCD, LOW);
digitalWrite(APieCA, LOW);
digitalWrite(BPieCD, LOW);
digitalWrite(BPieCA, LOW);
char letter = Serial.read();
if (letter == 'C')
{
randNumber = random(1, 16);
digitalWrite(LedA, LOW);
digitalWrite(IZQD, LOW);
digitalWrite(BIZQD, LOW);
digitalWrite(IZQA, LOW);
digitalWrite(BIZQA, LOW);
digitalWrite(DERD, HIGH);
digitalWrite(BDERD, HIGH);
digitalWrite(DERA, LOW);
digitalWrite(BDERA, LOW);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Derecha"));
digitalWrite(LedA, HIGH);
delay(2500);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
}
else if (letter == 'D')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(IZQD, LOW);
digitalWrite(IZQA, HIGH);
digitalWrite(DERD, LOW);
digitalWrite(DERA, LOW);
digitalWrite(BIZQD, LOW);
digitalWrite(BIZQA, HIGH);
digitalWrite(BDERD, LOW);
digitalWrite(BDERA, LOW);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Izquierda"));
delay (2500);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
}
else if (letter == 'A')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(IZQD, HIGH);
digitalWrite(IZQA, LOW);
digitalWrite(DERD, LOW);
digitalWrite(DERA, HIGH);
digitalWrite(BIZQD, HIGH);
digitalWrite(BIZQA, LOW);
digitalWrite(BDERD, LOW);
digitalWrite(BDERA, HIGH);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Adelante"));
digitalWrite(LedA, HIGH);
delay(1000);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
}
else if (letter == 'B')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(IZQD, LOW);
digitalWrite(IZQA, HIGH);
digitalWrite(DERD, HIGH);
digitalWrite(DERA, LOW);
digitalWrite(BIZQD, LOW);
digitalWrite(BIZQA, HIGH);
digitalWrite(BDERD, HIGH);
digitalWrite(BDERA, LOW);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Atras"));
digitalWrite(LedA, HIGH);
delay(1000);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
}
else if (letter == 'E')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(CABD, LOW);
digitalWrite(CABA, HIGH);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Cab Izq"));
digitalWrite(LedA, HIGH);
delay(10000);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
digitalWrite(CABD, LOW);
digitalWrite(CABA, LOW);
}
else if (letter == 'F')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(CABD, HIGH);
digitalWrite(CABA, LOW);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F(" Cab Der"));
digitalWrite(LedA, HIGH);
delay(10000);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
digitalWrite(CABD, LOW);
digitalWrite(CABA, LOW);
}
if (letter == 'G')
{
randNumber = random(1, 16);
digitalWrite(LedA, LOW);
digitalWrite(APieCD, HIGH);
digitalWrite(APieCA, LOW);
digitalWrite(BPieCD, HIGH);
digitalWrite(BPieCA, LOW);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Pie Central Arriba"));
digitalWrite(LedA, HIGH);
delay(1500);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
digitalWrite(APieCD, LOW);
digitalWrite(APieCA, LOW);
digitalWrite(BPieCD, LOW);
digitalWrite(BPieCA, LOW);
}
else if (letter == 'H')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(APieCD, LOW);
digitalWrite(APieCA, HIGH);
digitalWrite(BPieCD, LOW);
digitalWrite(BPieCA, HIGH);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Pie Central Abajo"));
digitalWrite(LedA, HIGH);
delay(300);
digitalWrite(LedA, LOW);
digitalWrite(LedR, HIGH);
digitalWrite(APieCD, LOW);
digitalWrite(APieCA, LOW);
digitalWrite(BPieCD, LOW);
digitalWrite(BPieCA, LOW);
}
else if (letter == 'I')
{
digitalWrite(LedR, LOW);
randNumber = random(1, 16);
digitalWrite(IZQD, LOW);
digitalWrite(IZQA, LOW);
digitalWrite(DERD, LOW);
digitalWrite(DERA, LOW);
myDFPlayer.play(randNumber);
Serial.println(randNumber);
Serial.println(F("Stop"));
}
}
static unsigned long timer = millis();
if (millis() - timer > 3000) {
timer = millis();
}
}
Read other posts